
目录
快速导航-
专家视角 | 对“C4KISR”的再思考
专家视角 | 对“C4KISR”的再思考
-
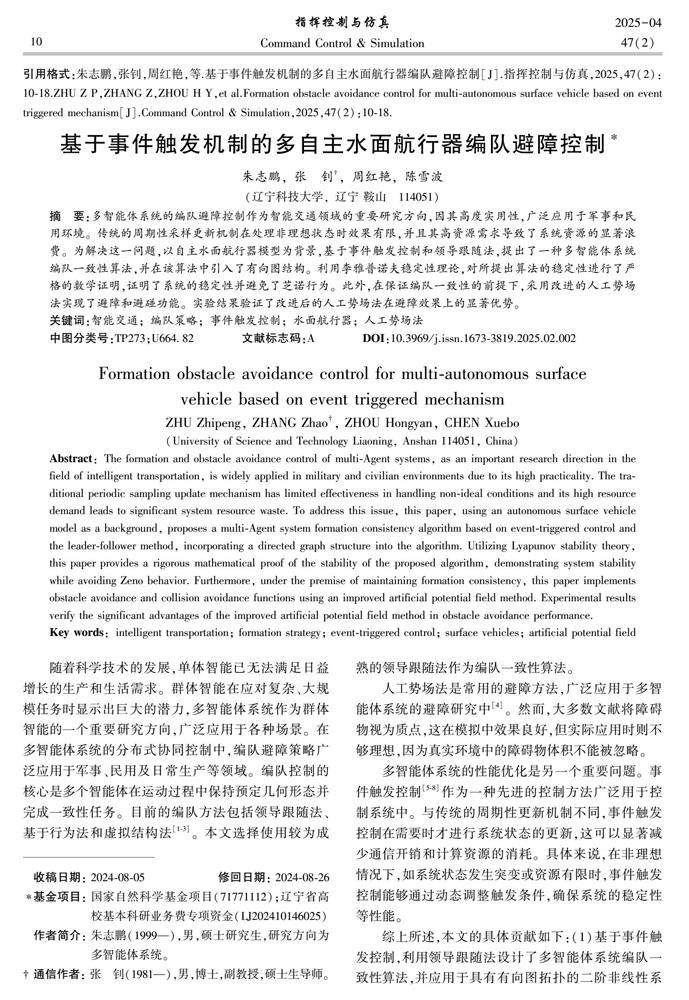
智能无人作战 | 基于事件触发机制的多自主水面航行器编队避障控制
智能无人作战 | 基于事件触发机制的多自主水面航行器编队避障控制
-
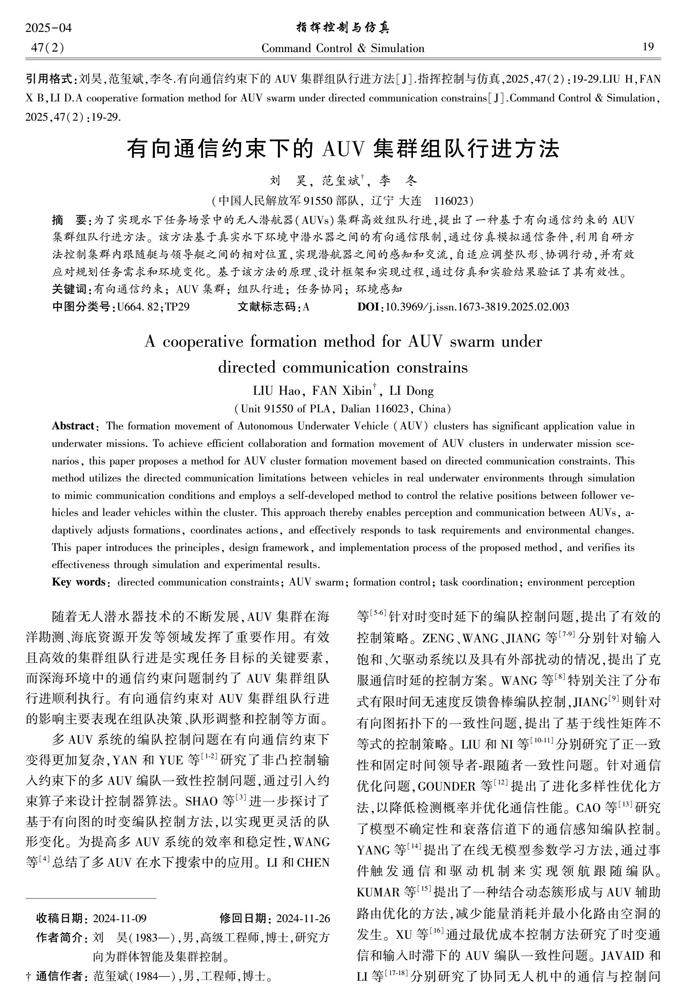
智能无人作战 | 有向通信约束下的AUV集群组队行进方法
智能无人作战 | 有向通信约束下的AUV集群组队行进方法
-
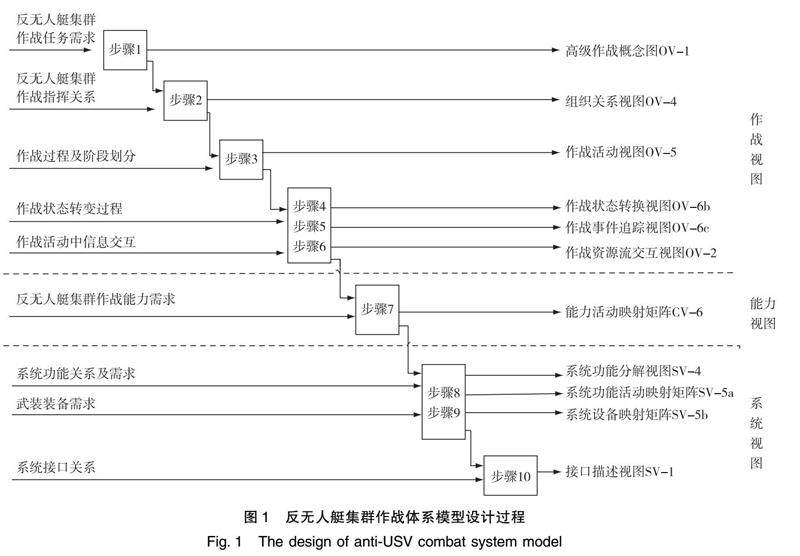
智能无人作战 | 基于DoDAF的反无人艇集群作战体系设计
智能无人作战 | 基于DoDAF的反无人艇集群作战体系设计
-

智能信息融合 | 基于可见光-红外特征级融合的低光照下伪装目标智能检测技术
智能信息融合 | 基于可见光-红外特征级融合的低光照下伪装目标智能检测技术
-
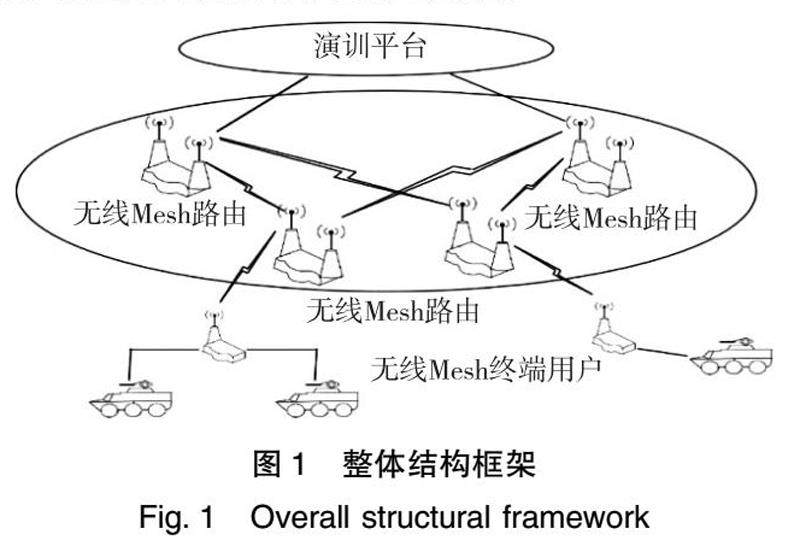
智能信息融合 | 基于Mesh网络多源异构混合信息一体融合技术研究
智能信息融合 | 基于Mesh网络多源异构混合信息一体融合技术研究
-
智能信息融合 | 面向多运动扩展目标的认知MIMO雷达波形设计
智能信息融合 | 面向多运动扩展目标的认知MIMO雷达波形设计
-
智能信息融合 | 基于多源信息融合的导弹挂飞可靠性评定方法
智能信息融合 | 基于多源信息融合的导弹挂飞可靠性评定方法
-
智能信息融合 | 基于深度学习的演训文书事件提取技术
智能信息融合 | 基于深度学习的演训文书事件提取技术
-
智能信息融合 | 基于深度学习网络的航迹分层分类研究
智能信息融合 | 基于深度学习网络的航迹分层分类研究
-
智能信息融合 | 一种基于深度学习水下高速航行器的目标识别方法研究
智能信息融合 | 一种基于深度学习水下高速航行器的目标识别方法研究
-
智能信息融合 | 基于卷积神经网络草图指令识别技术研究
智能信息融合 | 基于卷积神经网络草图指令识别技术研究
-
武器与信息系统 | 基于弹目交会机理的高炮着发射击毁伤概率计算
武器与信息系统 | 基于弹目交会机理的高炮着发射击毁伤概率计算
-

武器与信息系统 | 改进FMEA在火箭炮故障维修方式选择中的应用
武器与信息系统 | 改进FMEA在火箭炮故障维修方式选择中的应用
-
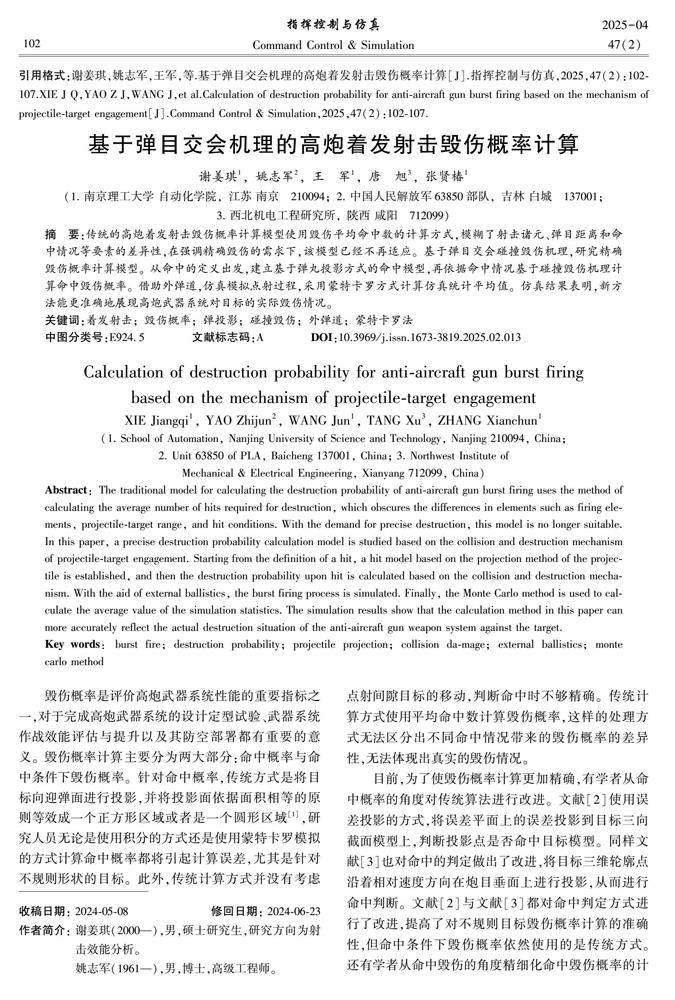
武器与信息系统 | 基于容器技术的指控软件快速部署应用研究
武器与信息系统 | 基于容器技术的指控软件快速部署应用研究
-
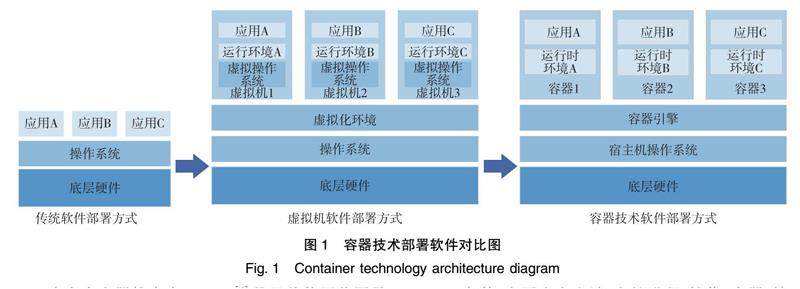
建模仿真与评估 | 面向大模型多智能体系统的多维评估方法
建模仿真与评估 | 面向大模型多智能体系统的多维评估方法
-
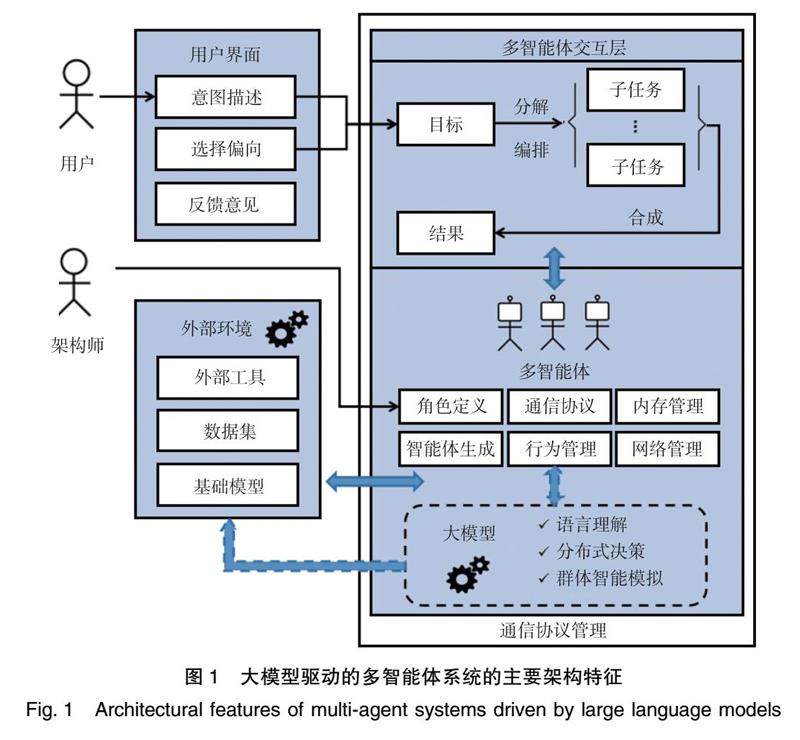
建模仿真与评估 | 基于NetLogo的多智能体空战模拟
建模仿真与评估 | 基于NetLogo的多智能体空战模拟
-
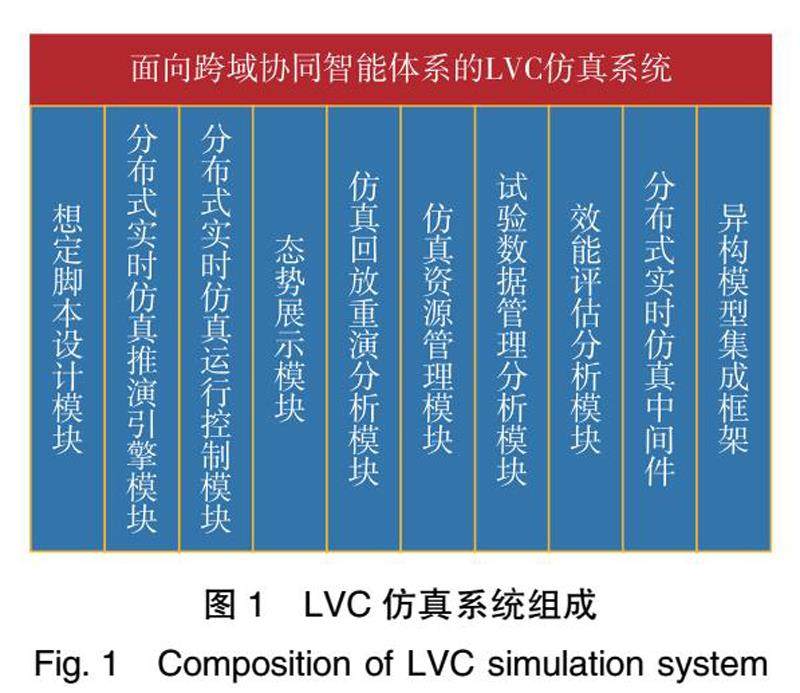
建模仿真与评估 | 面向跨域协同智能体系的多粒度LVC仿真系统设计
建模仿真与评估 | 面向跨域协同智能体系的多粒度LVC仿真系统设计
-
建模仿真与评估 | 面向仿真实验的联合作战方案结构化表示方法
建模仿真与评估 | 面向仿真实验的联合作战方案结构化表示方法
-
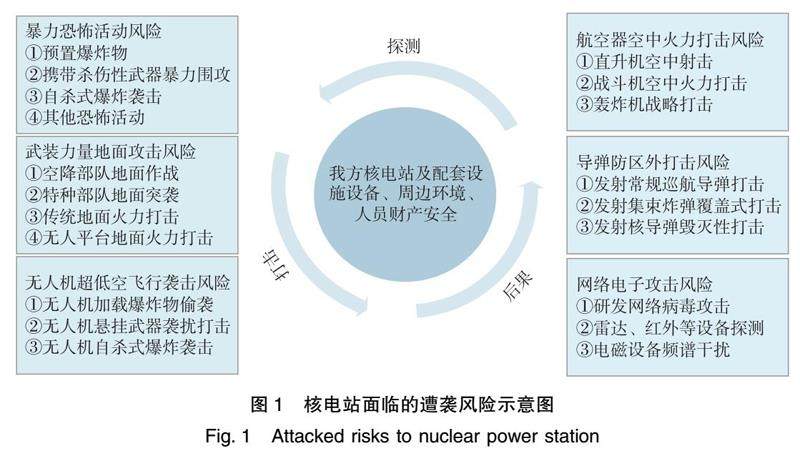
建模仿真与评估 | 核电站遭袭风险分析及影响因素研究
建模仿真与评估 | 核电站遭袭风险分析及影响因素研究







 登录
登录