

目录
快速导航-
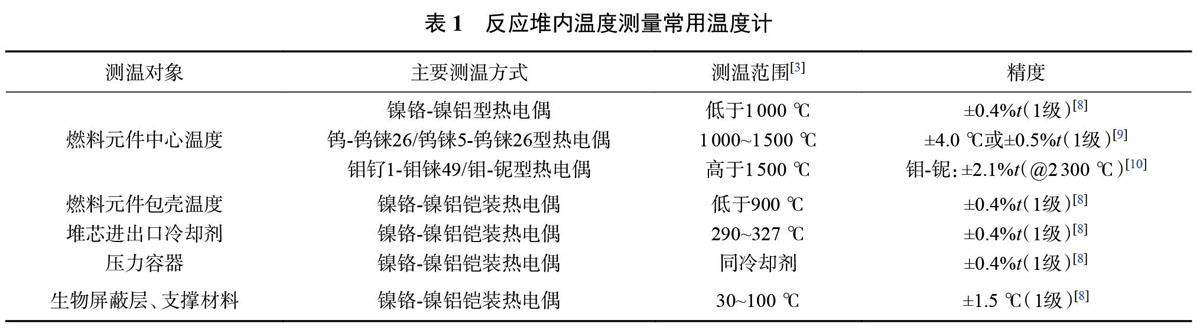
前沿综述 | 核反应堆内温度测量研究进展与展望
前沿综述 | 核反应堆内温度测量研究进展与展望
-
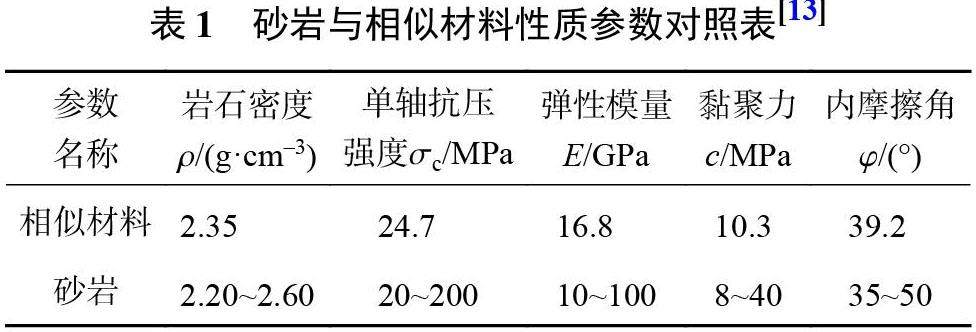
测试方法 | 非贯通断续节理岩石剪切力学特性及破坏机理研究
测试方法 | 非贯通断续节理岩石剪切力学特性及破坏机理研究
-
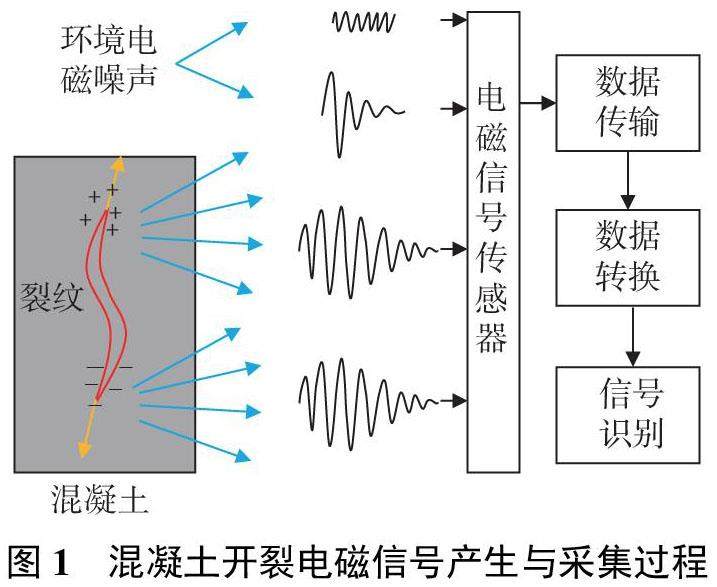
测试方法 | 基于GoogLeNet的混凝土活动裂纹电磁辐射信号识别方法
测试方法 | 基于GoogLeNet的混凝土活动裂纹电磁辐射信号识别方法
-
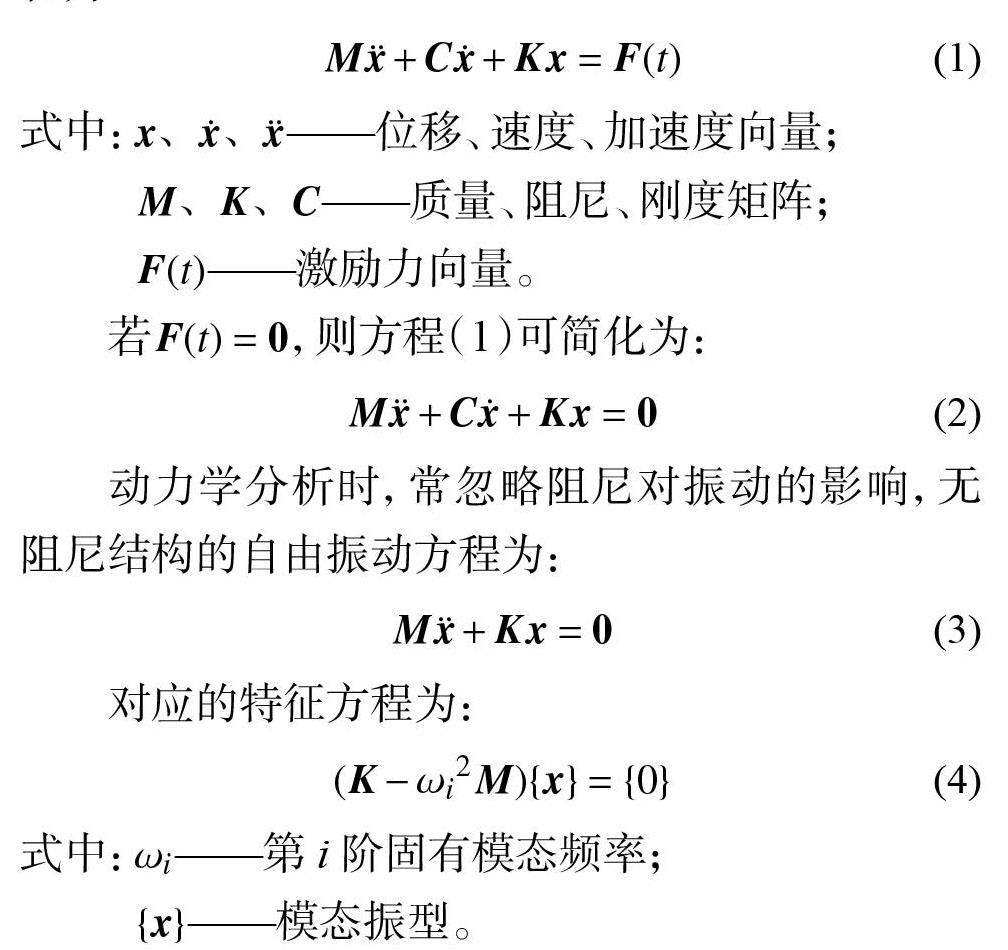
测试方法 | 飞轮壳模态参数识别及有限元模型修正研究
测试方法 | 飞轮壳模态参数识别及有限元模型修正研究
-
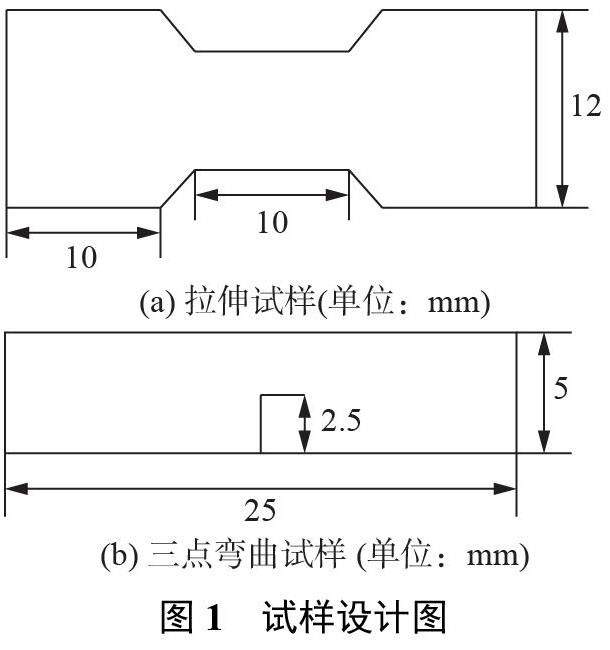
测试方法 | 体外脱钙对牛股骨松质骨拉伸和断裂性能影响的实验研究
测试方法 | 体外脱钙对牛股骨松质骨拉伸和断裂性能影响的实验研究
-
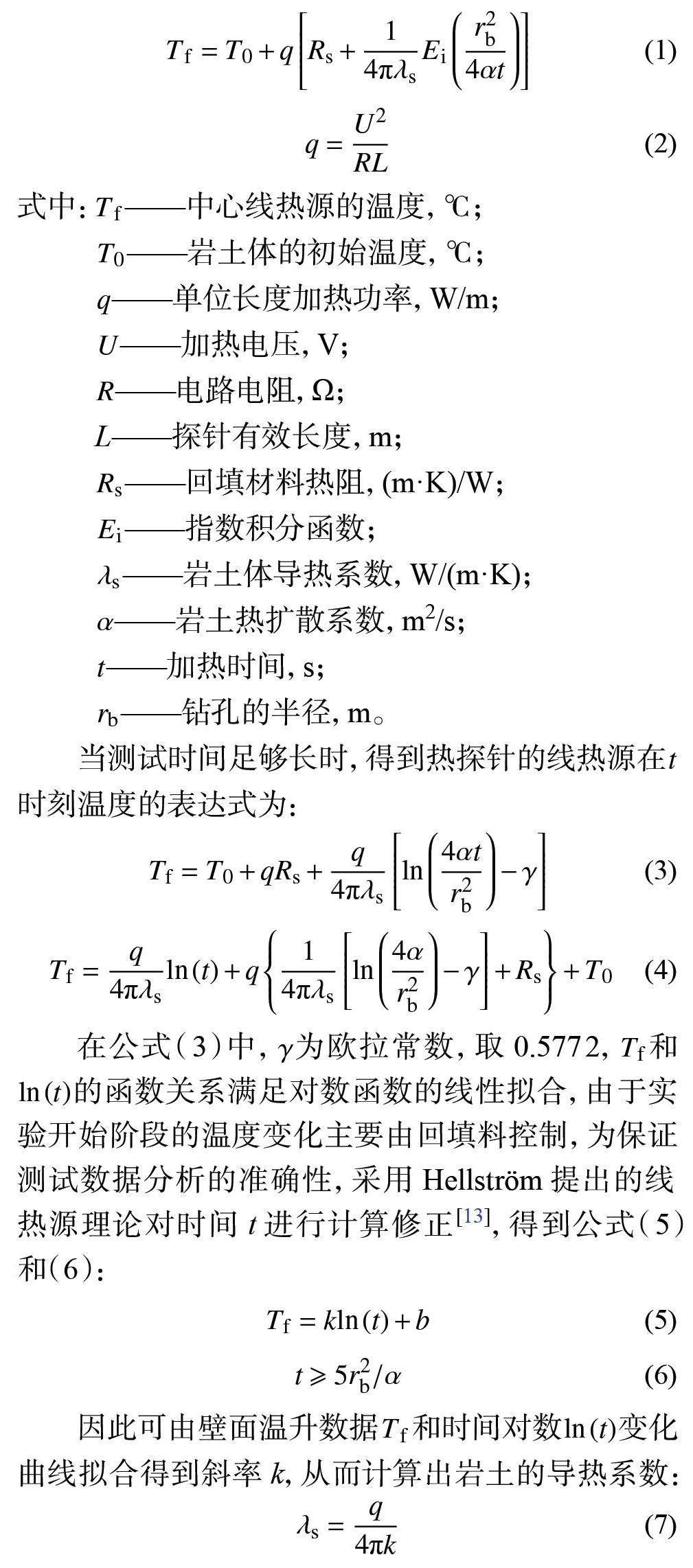
测试方法 | 基于非稳态线源传热理论的弱结构岩体导热系数测试方法研究
测试方法 | 基于非稳态线源传热理论的弱结构岩体导热系数测试方法研究
-

测试方法 | 基于ISS-3DSC特征的点云配准方法
测试方法 | 基于ISS-3DSC特征的点云配准方法
-
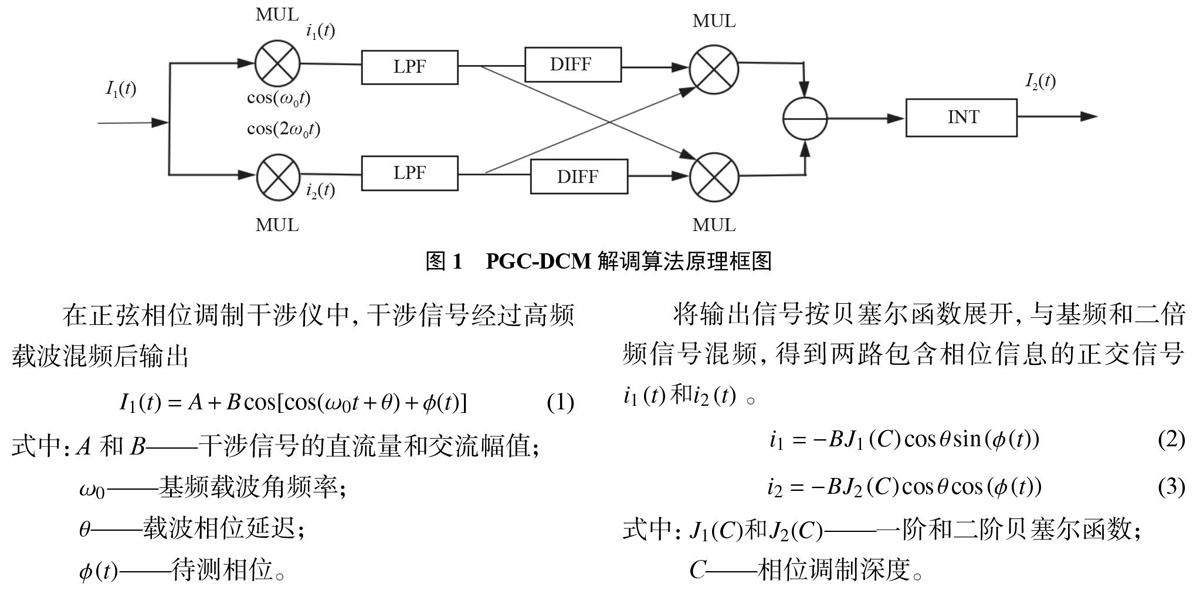
测试方法 | 一种改进的相位生成载波解调方法
测试方法 | 一种改进的相位生成载波解调方法
-
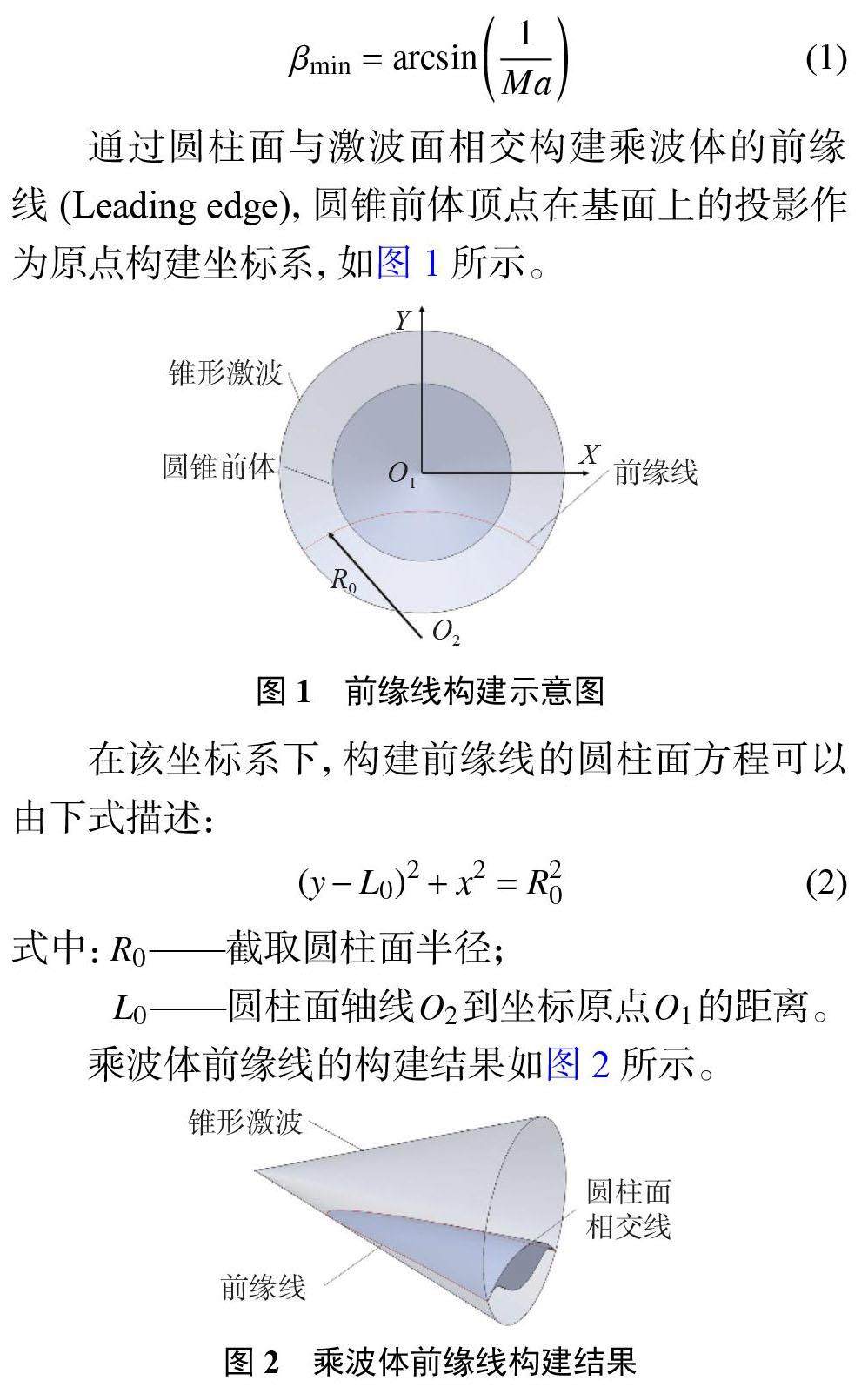
测试方法 | 基于锥导理论的变体乘波体构型设计与研究
测试方法 | 基于锥导理论的变体乘波体构型设计与研究
-
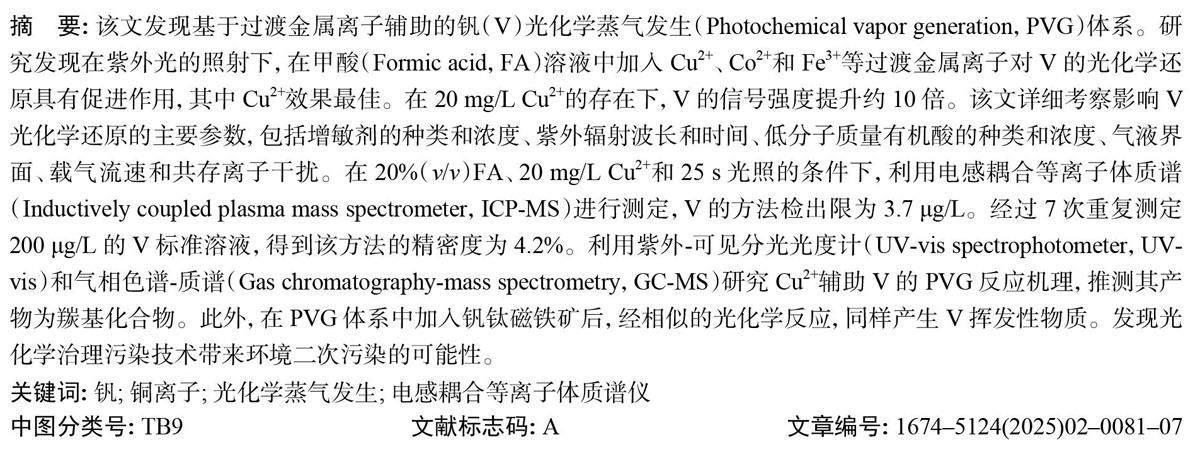
测试方法 | 过渡金属离子辅助的钒光化学蒸气发生
测试方法 | 过渡金属离子辅助的钒光化学蒸气发生
-
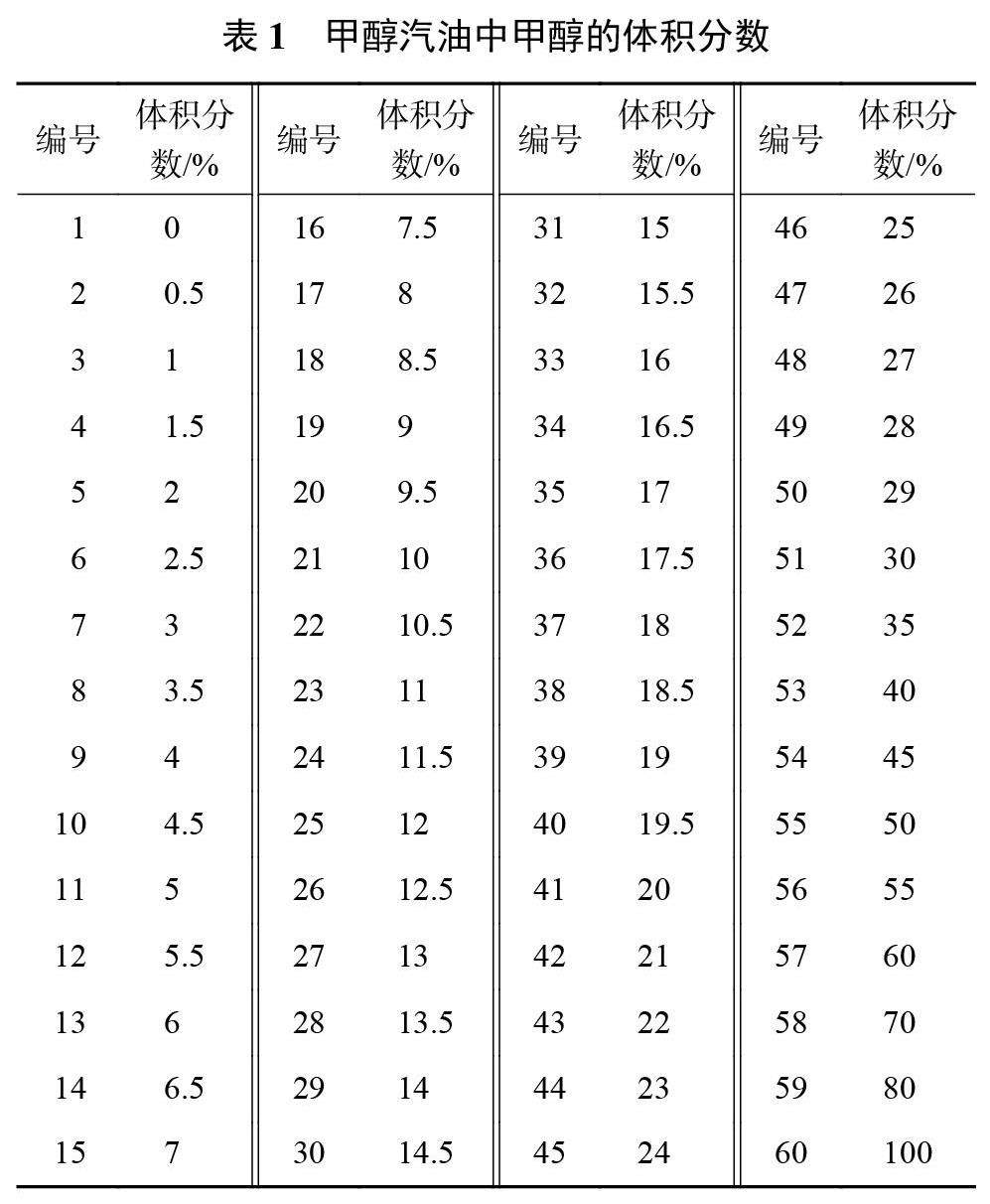
测试方法 | 应用近红外光谱特征谱段快速分析甲醇汽油甲醇含量
测试方法 | 应用近红外光谱特征谱段快速分析甲醇汽油甲醇含量
-
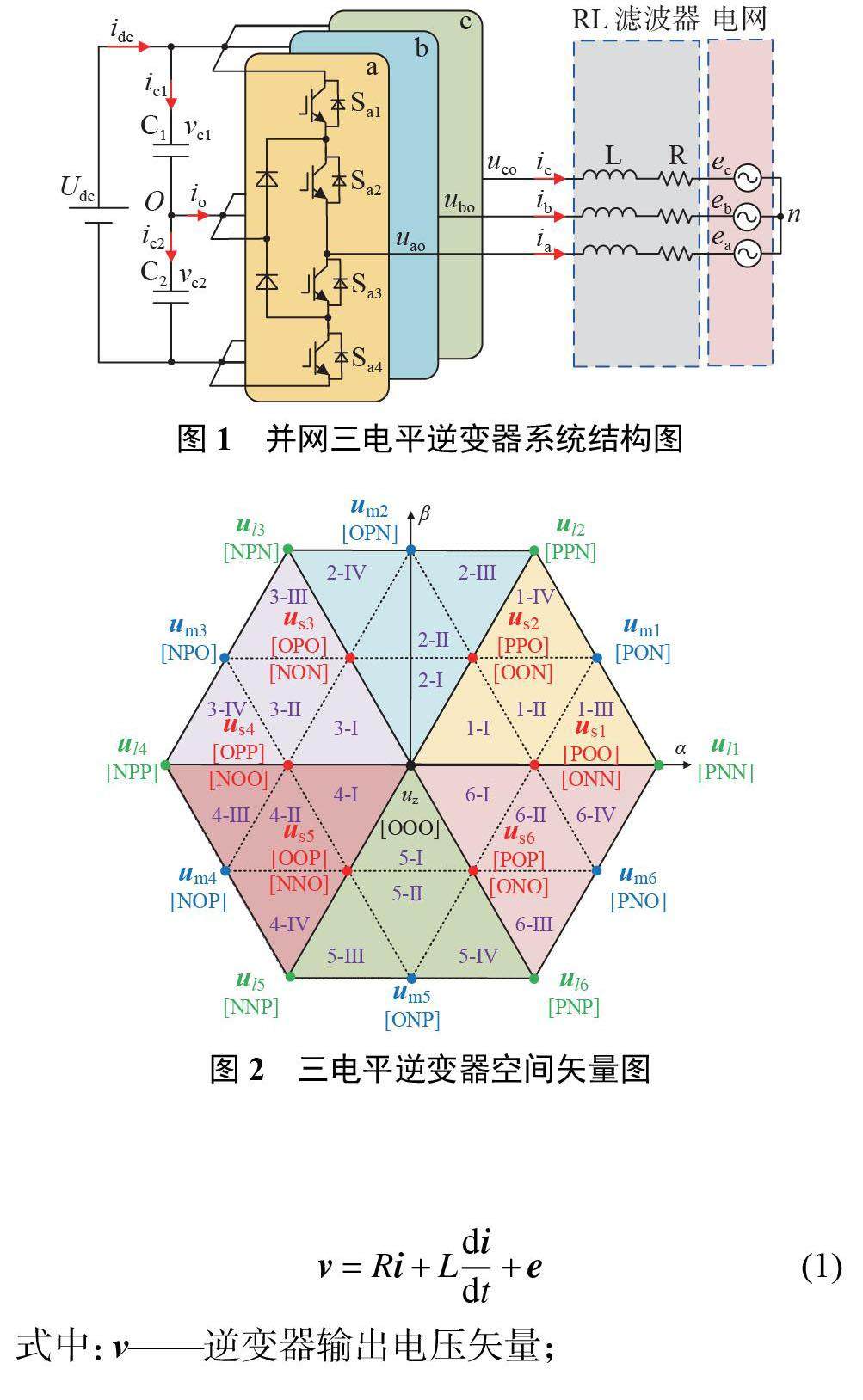
仪器设备 | 三电平逆变器固定开关频率的模型预测开关序列控制
仪器设备 | 三电平逆变器固定开关频率的模型预测开关序列控制
-
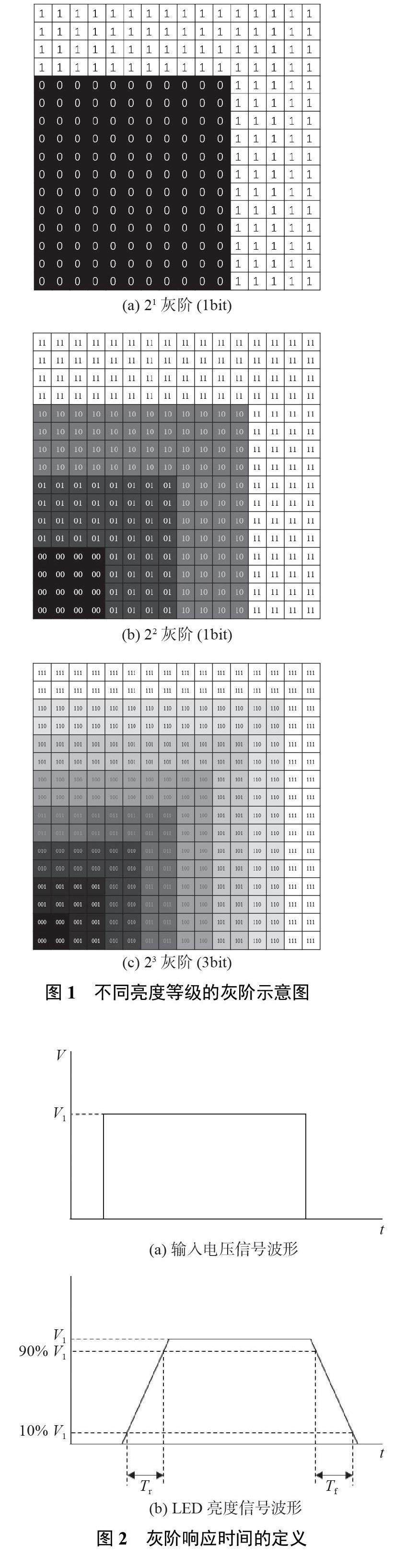
仪器设备 | Mini LED直显屏的灰阶响应时间特性测试方法研究
仪器设备 | Mini LED直显屏的灰阶响应时间特性测试方法研究
-
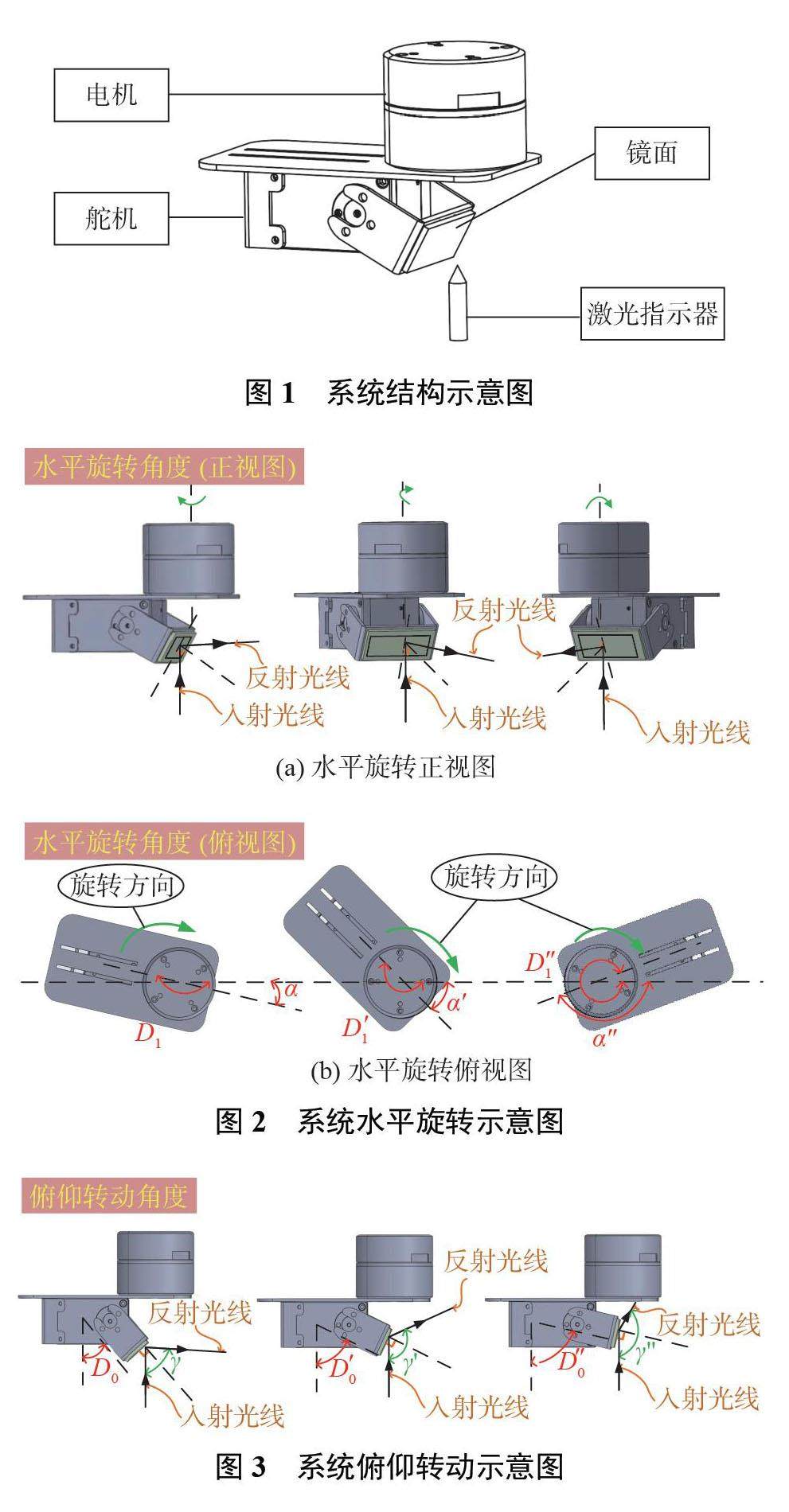
仪器设备 | 用于激光反射镜面调节的双电机控制系统设计
仪器设备 | 用于激光反射镜面调节的双电机控制系统设计
-
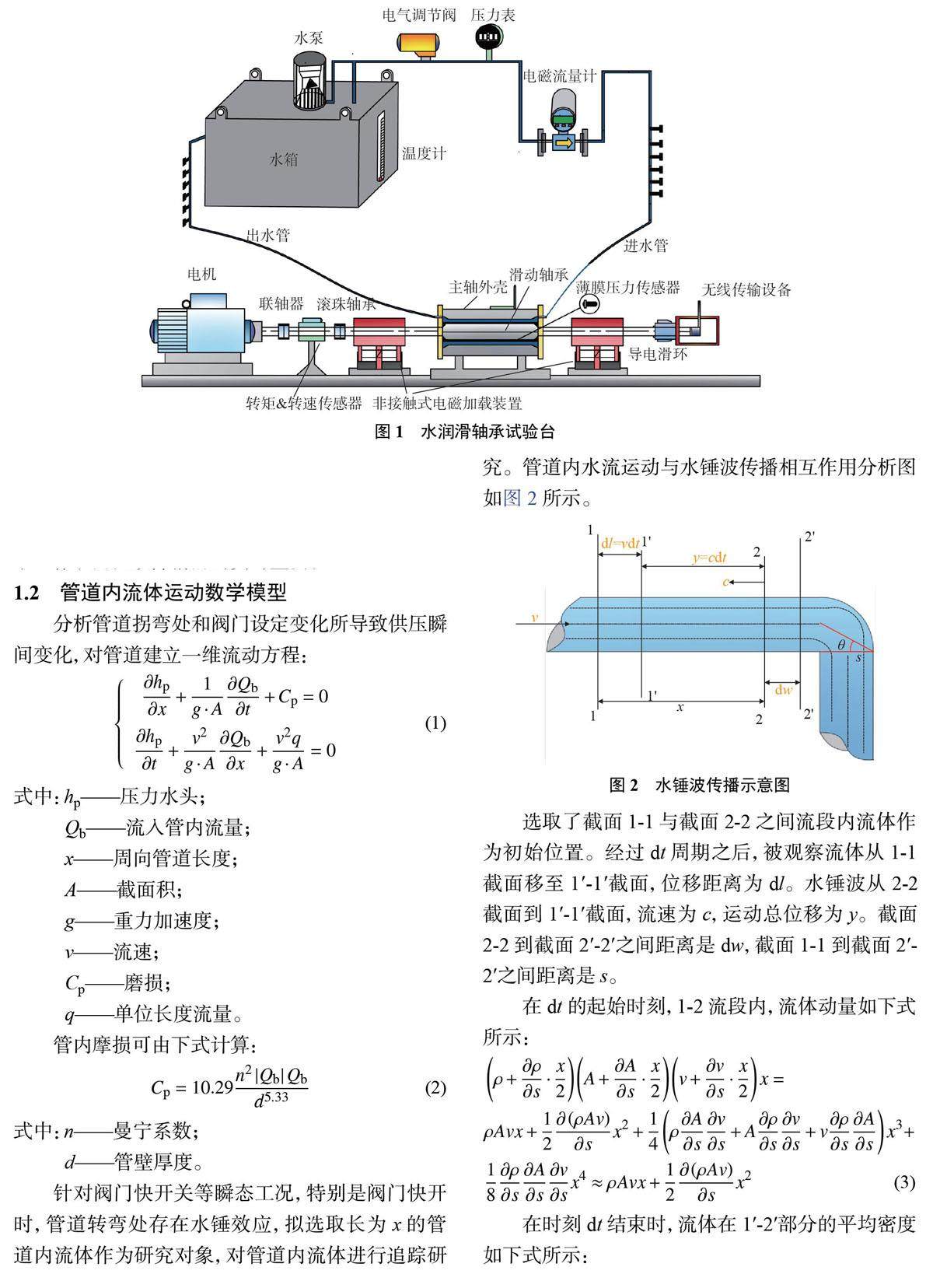
仪器设备 | 水润滑轴承润滑系统改进滑模自抗扰控制方法
仪器设备 | 水润滑轴承润滑系统改进滑模自抗扰控制方法
-
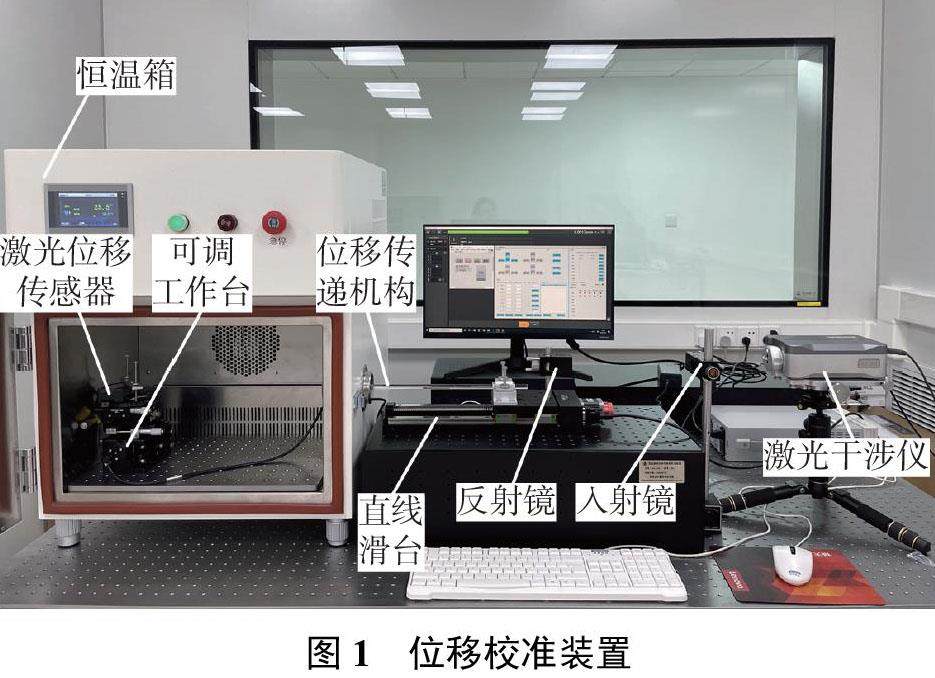
仪器设备 | 激光位移传感器工作温度条件下的校准
仪器设备 | 激光位移传感器工作温度条件下的校准
-
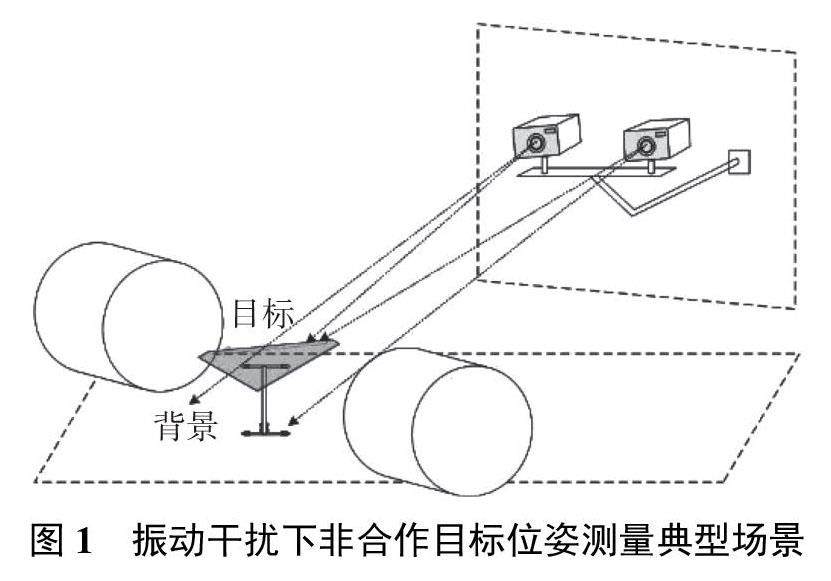
技术应用 | 振动干扰下非合作目标双目位姿测量方法
技术应用 | 振动干扰下非合作目标双目位姿测量方法
-
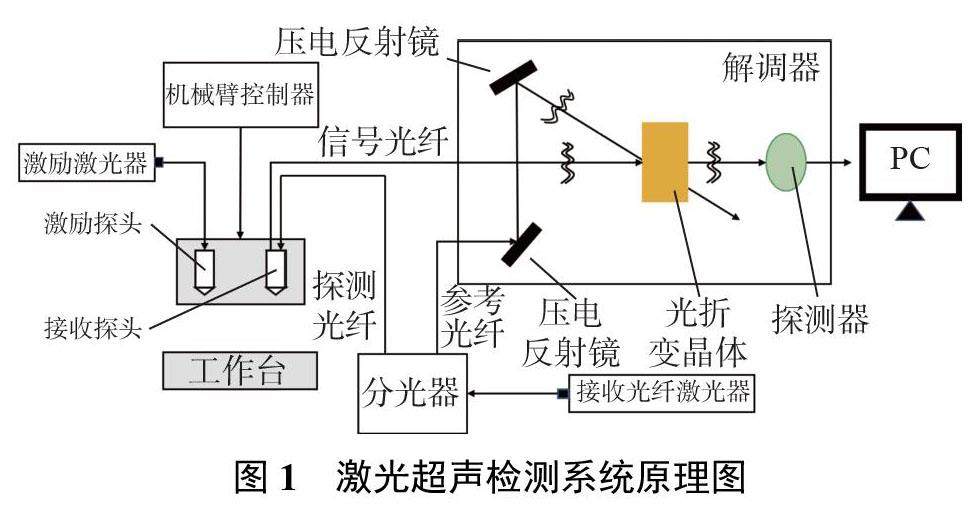
技术应用 | 裂纹深度的激光超声透射瑞利波定量检测
技术应用 | 裂纹深度的激光超声透射瑞利波定量检测
-
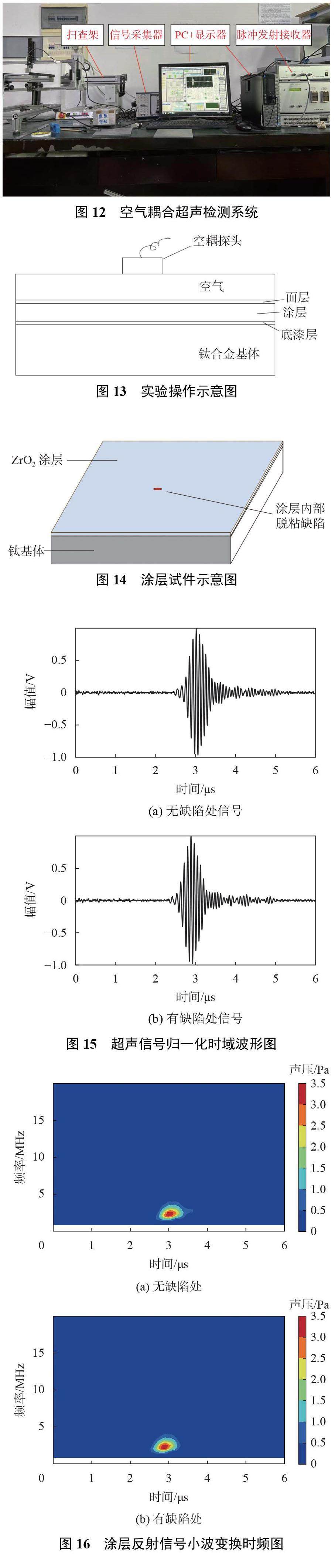
技术应用 | 空气耦合超声隐身涂层脱粘缺陷检测技术
技术应用 | 空气耦合超声隐身涂层脱粘缺陷检测技术
-
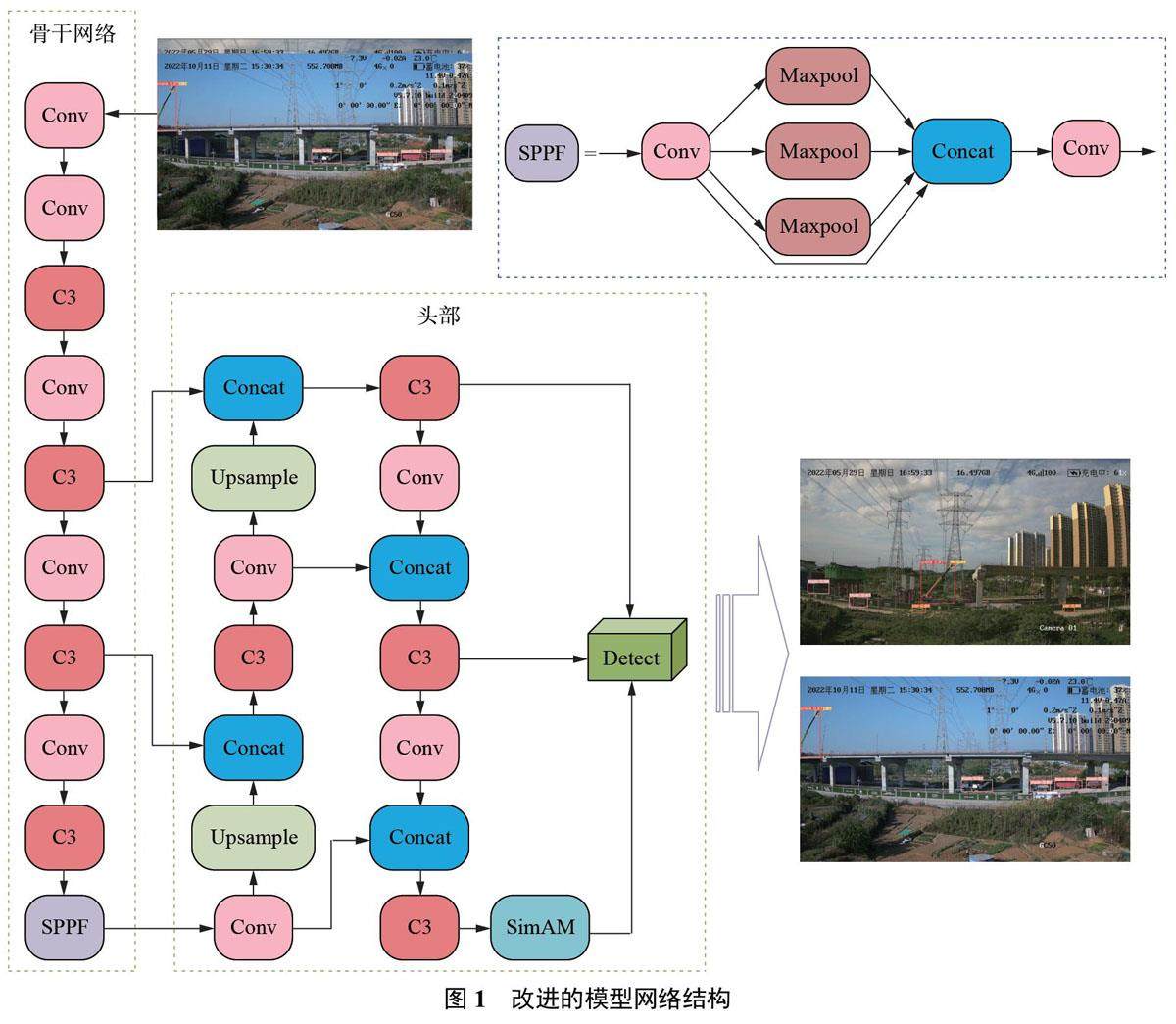
技术应用 | 基于改进YOLOv5s的输电通道隐患目标检测方法
技术应用 | 基于改进YOLOv5s的输电通道隐患目标检测方法
-
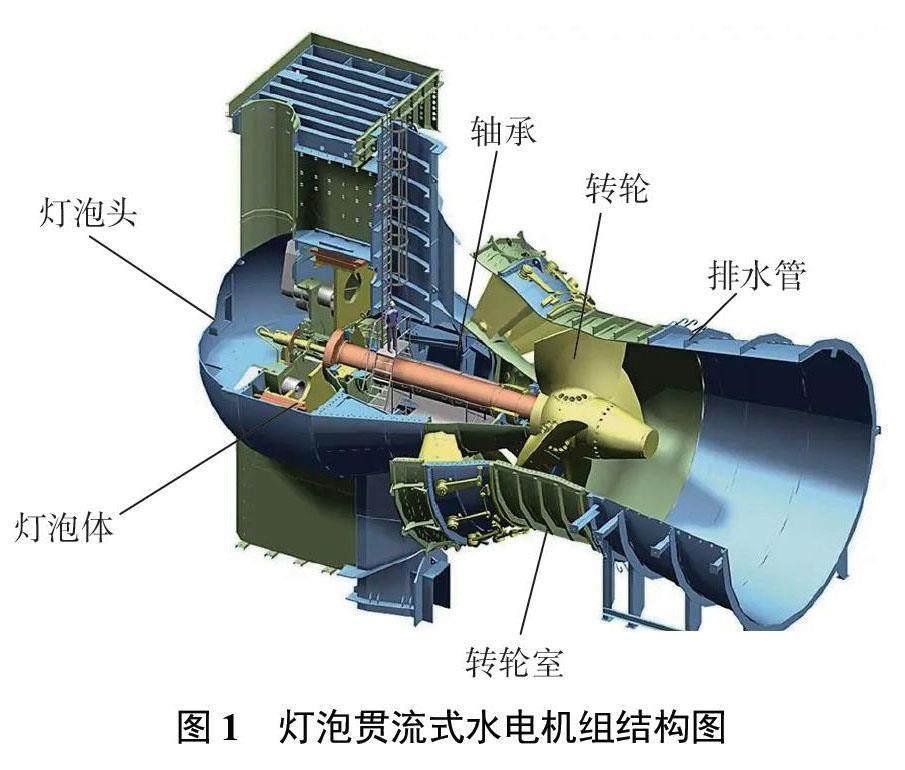
技术应用 | 基于孤立森林的水电机组异常噪声分析方法
技术应用 | 基于孤立森林的水电机组异常噪声分析方法
-

技术应用 | 自适应MPC智能车轨迹跟踪控制
技术应用 | 自适应MPC智能车轨迹跟踪控制
-
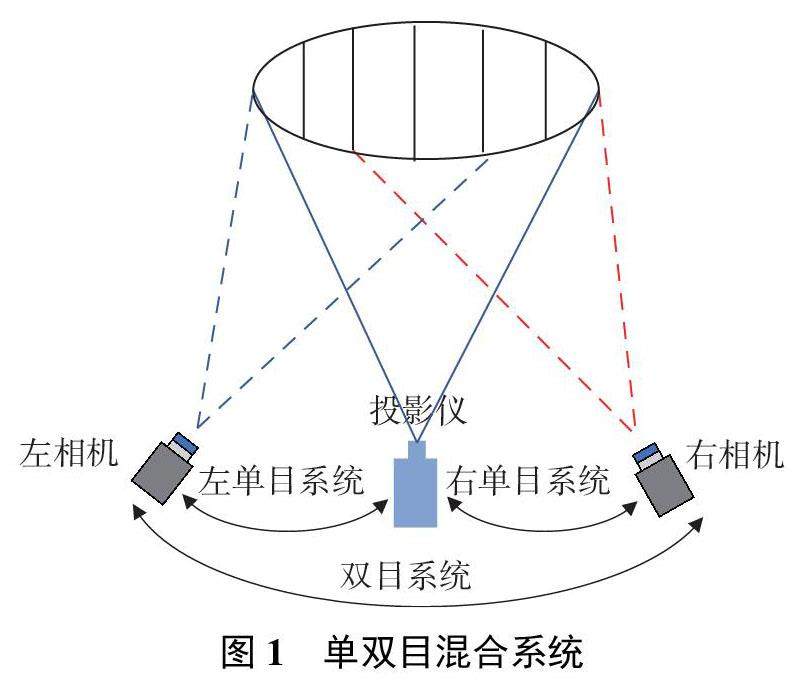
技术应用 | 基于面结构光的单双目混合扫描技术
技术应用 | 基于面结构光的单双目混合扫描技术









 登录
登录