

目录
快速导航-

通信与信息工程 | 4T/8T像素结构CMOS图像传感器的空间辐照影响及加固技术研究
通信与信息工程 | 4T/8T像素结构CMOS图像传感器的空间辐照影响及加固技术研究
-

通信与信息工程 | 基于FAST网络的毫米波雷达端到端手势识别
通信与信息工程 | 基于FAST网络的毫米波雷达端到端手势识别
-

通信与信息工程 | 面向远海场景的统计信道建模与性能分析
通信与信息工程 | 面向远海场景的统计信道建模与性能分析
-

通信与信息工程 | 低轨卫星捕获算法的优化与FPGA实现
通信与信息工程 | 低轨卫星捕获算法的优化与FPGA实现
-

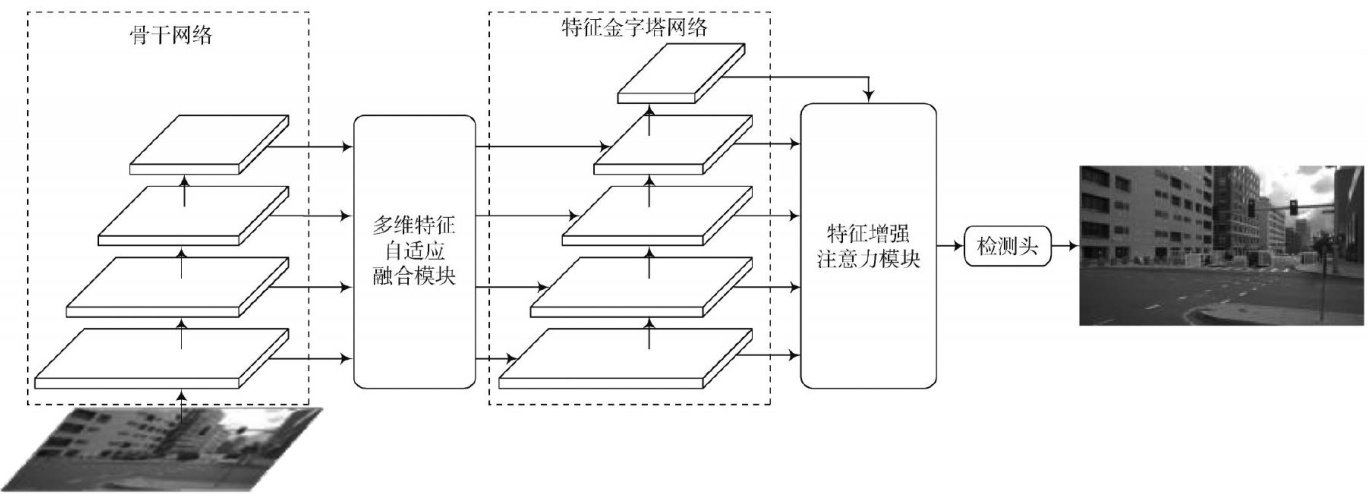
信号分析与图像处理 | 结合特征增强注意力的混合卷积去雾网络
信号分析与图像处理 | 结合特征增强注意力的混合卷积去雾网络
-

信号分析与图像处理 | 基于跨尺度特征融合的内窥镜图像增强算法
信号分析与图像处理 | 基于跨尺度特征融合的内窥镜图像增强算法
-

信号分析与图像处理 | 一种抗遮挡重叠与尺度变化的行人检测算法
信号分析与图像处理 | 一种抗遮挡重叠与尺度变化的行人检测算法
-

信号分析与图像处理 | 基于卷积神经网络的高分辨率遥感影像目标边界提取方法
信号分析与图像处理 | 基于卷积神经网络的高分辨率遥感影像目标边界提取方法
-

信号分析与图像处理 | 基于隐含特征和SIFT方法的SAR图像多尺度配准
信号分析与图像处理 | 基于隐含特征和SIFT方法的SAR图像多尺度配准
-
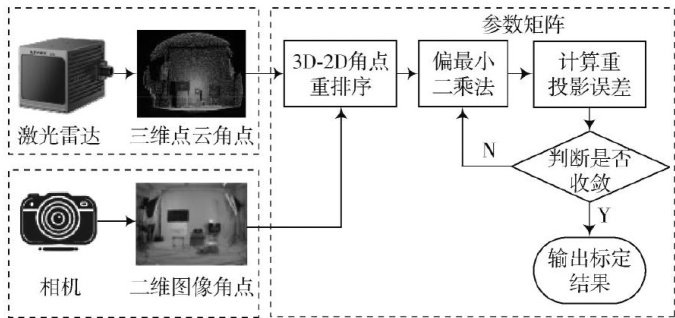
信号分析与图像处理 | 基于LM算法的三维点云与二维图像标定方法
信号分析与图像处理 | 基于LM算法的三维点云与二维图像标定方法
-

信号分析与图像处理 | 基于多任务学习的跳频调制方式识别与信噪比估计方法
信号分析与图像处理 | 基于多任务学习的跳频调制方式识别与信噪比估计方法
-

信号分析与图像处理 | 考虑强噪声干扰的数字音频信号质量增强方法
信号分析与图像处理 | 考虑强噪声干扰的数字音频信号质量增强方法
-

信号分析与图像处理 | 改进YOLOv8n的无人机航拍目标检测算法
信号分析与图像处理 | 改进YOLOv8n的无人机航拍目标检测算法
-

网络与信息安全 | 基于图的稀疏注意力实例分割算法
网络与信息安全 | 基于图的稀疏注意力实例分割算法
-

网络与信息安全 | 基于深度光流估计网络的流速测量方法
网络与信息安全 | 基于深度光流估计网络的流速测量方法
-

网络与信息安全 | 基于SpaceP和K-means的货运航司航线网络特征分析研究
网络与信息安全 | 基于SpaceP和K-means的货运航司航线网络特征分析研究
-

测控与自动化技术 | 基于约束跟随理论的动量轮倒立摆控制研究
测控与自动化技术 | 基于约束跟随理论的动量轮倒立摆控制研究
-
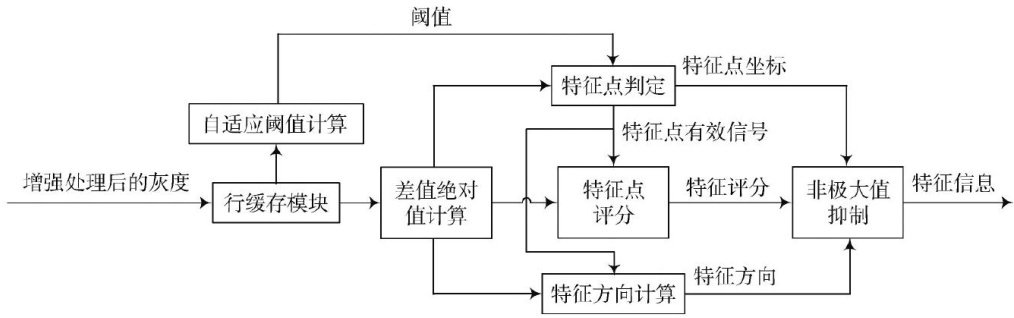
测控与自动化技术 | 基于FPGA的轻量化自适应ORB算法研究与实现
测控与自动化技术 | 基于FPGA的轻量化自适应ORB算法研究与实现
-

测控与自动化技术 | 基于全局与局部特征引导的显著性目标检测网络
测控与自动化技术 | 基于全局与局部特征引导的显著性目标检测网络
-

测控与自动化技术 | 基于改进EEMD-FFT-FRFT的非平稳故障特征提取方法
测控与自动化技术 | 基于改进EEMD-FFT-FRFT的非平稳故障特征提取方法
-

测控与自动化技术 | 小样本不平衡数据集异常双层窗口检测方法研究
测控与自动化技术 | 小样本不平衡数据集异常双层窗口检测方法研究
-
智能交通与导航 | 面向自动驾驶的多尺度目标三维检测算法
智能交通与导航 | 面向自动驾驶的多尺度目标三维检测算法
-
智能交通与导航 | 基于改进A-Star算法的机器人路径规划研究
智能交通与导航 | 基于改进A-Star算法的机器人路径规划研究
-
电子技术与应用 | 基于改进RRT算法的机械臂路径规划
电子技术与应用 | 基于改进RRT算法的机械臂路径规划
-

电子技术与应用 | 基于物联网的智慧粮仓系统的设计
电子技术与应用 | 基于物联网的智慧粮仓系统的设计
-

电子技术与应用 | 面向可重构结构的CNN模型混合压缩方法
电子技术与应用 | 面向可重构结构的CNN模型混合压缩方法
-

电子技术与应用 | 开源软件无线电在LabVIEW中的信号采集应用研究
电子技术与应用 | 开源软件无线电在LabVIEW中的信号采集应用研究
-

电子技术与应用 | 无线视频传感器网络全视角目标栅栏合并技术研究
电子技术与应用 | 无线视频传感器网络全视角目标栅栏合并技术研究
 范围内,湿度误差可控制在 ±5%RH 范围内,通过云平台可远程监测和控制粮仓的运行状态,及时调整通风、加热、降温等设备工作,确保智慧粮仓系统安全稳定运行。
范围内,湿度误差可控制在 ±5%RH 范围内,通过云平台可远程监测和控制粮仓的运行状态,及时调整通风、加热、降温等设备工作,确保智慧粮仓系统安全稳定运行。




















 登录
登录